北理工團隊在光電鑷三位自由操控研究方面取得重要突破
發(fā)布日期:2025-05-14 供稿:集成電路與電子學(xué)院 攝影:集成電路與電子學(xué)院
編輯:李曉雨 審核:薛正輝 閱讀次數(shù):
在微觀世界中,如何讓微米級機器實現(xiàn)復(fù)雜的三維運動一直是科學(xué)界的難題。傳統(tǒng)微機器受限于二維平面運動,難以在復(fù)雜微環(huán)境中執(zhí)行多任務(wù)操作。近日,北京理工大學(xué)集成電路與電子學(xué)院張帥龍教授團隊聯(lián)合多所高校在《Advanced Materials》(IF="27.4)發(fā)表研究成果,首次實現(xiàn)光驅(qū)動多組件微機器系統(tǒng)的三維跨平面運動傳遞,為微流控、靶向給藥等領(lǐng)域帶來全新可能,該論文被選作期刊封面。北京理工大學(xué)為第一完成單位,張帥龍教授與李家方教授為通訊作者,集成電路與電子學(xué)院博士生李恭為論文第一作者。該工作得到了集成電路與電子學(xué)院沈國震教授、王業(yè)亮教授、謝會開教授以及多倫多大學(xué)Aaron" R. Wheeler教授的指導(dǎo)。
論文入選Advanced Materials雜志封面
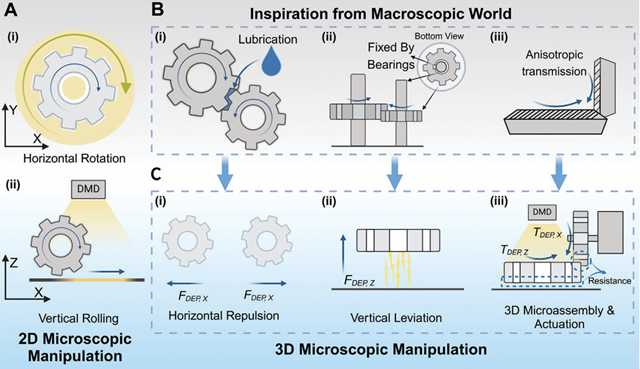
圖1. 構(gòu)建可在三維空間中運行的多組件微機器系統(tǒng)。
光電鑷(OET)技術(shù)革新:研究團隊利用可編程光圖案控制光電鑷(OET)系統(tǒng),通過電荷排斥效應(yīng)和介電泳懸浮力,成功實現(xiàn)了微齒輪的精準(zhǔn)翻轉(zhuǎn)、懸浮和三維組裝。該工作所使用的厚度僅30微米的微齒輪更容易進行翻轉(zhuǎn),翻轉(zhuǎn)角速度達1.2弧度/秒,可實現(xiàn)微齒輪工作平面的靈活切換。這一技術(shù)突破使得微機器能夠在三維空間內(nèi)自由運動,不再受限于傳統(tǒng)二維平面的束縛。

圖2. 微齒輪的翻轉(zhuǎn)行為A) 微齒輪在水平面旋轉(zhuǎn)的示意圖及顯微鏡圖像。B) 電壓關(guān)閉時平躺的微齒輪(左),電壓開啟后通過圓形光圖案推動翻轉(zhuǎn)至直立狀態(tài)。C) 直立微齒輪被空心矩形光圖案推動并在垂直平面滾動。D) 30 μm和60 μm厚微齒輪在XY平面的相對電場分布模擬。E) 30 μm和60 μm厚微齒輪在XZ平面的相對電場分布模擬。F) 不同位置下微齒輪的介電泳翻轉(zhuǎn)扭矩計算結(jié)果。G) 不同位置下微齒輪的翻轉(zhuǎn)角加速度計算結(jié)果。
跨維度運動傳遞:從2D到3D為了構(gòu)建穩(wěn)定的三維微齒輪系統(tǒng),團隊采用雙光子聚合(2PP)激光加工技術(shù),制造了微型支撐結(jié)構(gòu),使直立齒輪能夠穩(wěn)定旋轉(zhuǎn)。實驗中,水平旋轉(zhuǎn)的齒輪通過齒輪嚙合成功驅(qū)動了直立齒輪,實現(xiàn)了跨平面運動傳遞,這一突破為未來搭建復(fù)雜三維傳動模塊提供了重要基礎(chǔ)。
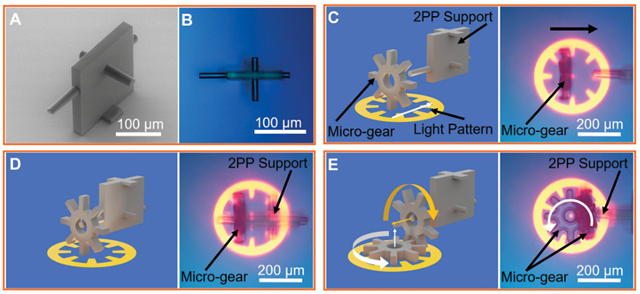
圖3. 基于OET的微齒輪系統(tǒng)組裝與驅(qū)動A) 2PP制備的機械支撐結(jié)構(gòu)SEM圖像。B)機械支撐的俯視顯微鏡圖像。C) 直立微齒輪與支撐結(jié)構(gòu)的組裝過程示意圖及實驗圖像。D) 組裝后微齒輪與支撐的互連結(jié)構(gòu)。E) 三維跨平面微齒輪組的運行示意圖及實驗圖像。
揭秘“電子潤滑”機制:研究團隊發(fā)現(xiàn),微齒輪表面的電荷會產(chǎn)生高達2511.8皮牛的排斥力,有效減少了齒輪間的摩擦,類似于宏觀機械系統(tǒng)中的潤滑劑。此外,介電泳力使微齒輪懸浮在基底上方約5.8微米,進一步降低了摩擦阻力。這種“電子潤滑+懸浮軸承”的機制,使得微齒輪系統(tǒng)能夠高效運轉(zhuǎn),為未來微機械設(shè)計提供了新思路。
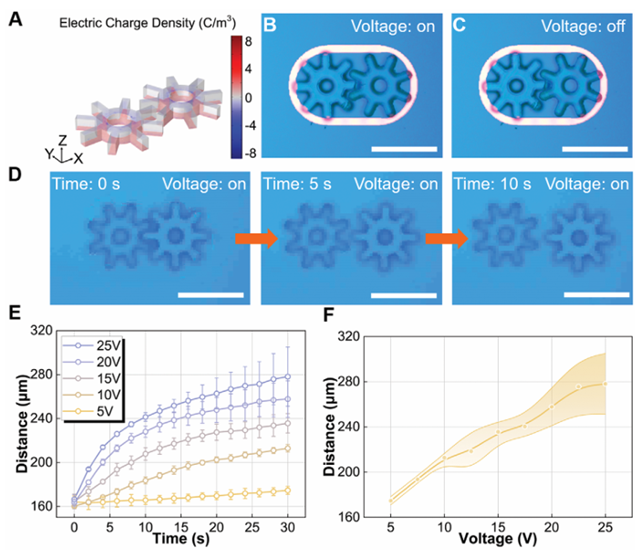
圖4. 微齒輪的排斥機制。A) 二維齒輪組表面電荷分布的模擬。B) 光圖案促使兩齒輪物理嚙合的顯微鏡圖像。C) 關(guān)閉電壓后齒輪運動無明顯變化的顯微鏡圖像。D) 關(guān)閉光圖案后齒輪因電壓排斥分離的顯微鏡圖像。E) 不同電壓下齒輪間距隨時間的變化。F) 不同電壓下齒輪最終間距的測量。
仿生設(shè)計,靈感來自宏觀世界:該研究的靈感來源于宏觀齒輪系統(tǒng),例如汽車變速箱中的錐齒輪組。團隊在微觀尺度上復(fù)現(xiàn)了類似的機械傳動原理,證明了宏觀機械工程經(jīng)驗在微觀世界仍然適用。這一發(fā)現(xiàn)為未來設(shè)計更復(fù)雜的微機械系統(tǒng)提供了重要參考。
這項技術(shù)的突破,將在多個領(lǐng)域帶來深遠影響:
生物醫(yī)學(xué):可構(gòu)建微型手術(shù)機器人,在血管內(nèi)進行三維操作,提高精準(zhǔn)度。
靶向給藥:多組件協(xié)同運輸藥物,穿越復(fù)雜生物屏障,提高治療效果。
微機電系統(tǒng)(MEMS):開發(fā)新型三維微傳感器和執(zhí)行器,推動微型機器人技術(shù)的發(fā)展。
研究團隊特別感謝北京理工大學(xué)分析測試中心給予的支持與幫助。該交叉學(xué)科研究工作得到了國家自然科學(xué)基金、國家重點研發(fā)計劃、北京市自然科學(xué)基金、重慶市自然科學(xué)基金等項目的支持。
文章信息(*為通訊作者):
Gong Li, Bingrui Xu, Xiaopu Wang, Jiangfan Yu, Yifan Zhang, Rongxin Fu, Fan Yang, Hongcheng Gu, Yuchen Huang, Yujie Chen, Yanfeng Zhang, Zhuoran Wang, Guozhen Shen, Yeliang Wang, HuikaiXie, Aaron R. Wheeler, Jiafang Li*, Shuailong Zhang*, “Crossing the Dimensional Divide with Optoelectronic Tweezers: Multicomponent Light-Driven Micromachines with Motion Transfer in Three Dimensions”, Advanced Materials, 2025, 37, 2417742.
論文鏈接:https://advanced.onlinelibrary.wiley.com/doi/abs/10.1002/adma.202417742
附作者簡介:
李恭,北京理工大學(xué)集成電路與電子學(xué)院博士生,研究方向為光電鑷技術(shù)、光驅(qū)動微機械系統(tǒng)、光電鑷控制算法等,目前已發(fā)表包括Advanced Materials、Microsystems & Nanoengineering、Nano Letters在內(nèi)的多篇高水平論文。
張帥龍,北京理工大學(xué)集成電路與電子學(xué)院教授、博士生導(dǎo)師(謝會開教授團隊),國家級青年人才,集成聲光電微納系統(tǒng)教育部工程研究中心副主任。主要從事生物微操作技術(shù)、光電鑷技術(shù)、微流控技術(shù)、生物芯片與傳感技術(shù)、微全分析系統(tǒng)研究。
李家方,北京理工大學(xué)光電學(xué)院黨委書記,物理學(xué)院特聘教授、博士生導(dǎo)師,國家級青年人才。主要從事表面等離激元及光子晶體結(jié)構(gòu)中光和物質(zhì)的相互作用研究,并致力于發(fā)展納米剪紙、飛秒激光直寫等三維微納加工技術(shù)與應(yīng)用。
分享到: