北理工團(tuán)隊(duì)在復(fù)雜環(huán)境自動(dòng)駕駛數(shù)據(jù)集建設(shè)方面取得重要成果
發(fā)布日期:2025-03-18 供稿:機(jī)械與車輛學(xué)院 攝影:機(jī)械與車輛學(xué)院
編輯:蘇舒 審核:劉檢華 閱讀次數(shù):
近日,北京理工大學(xué)機(jī)械與車輛學(xué)院、智能無人系統(tǒng)技術(shù)國(guó)家級(jí)重點(diǎn)實(shí)驗(yàn)室徐彬、王偉達(dá)、王力老師團(tuán)隊(duì)聯(lián)合清華大學(xué)、新加坡國(guó)立大學(xué)等單位,在Nature子刊發(fā)布了國(guó)際首個(gè)復(fù)雜環(huán)境自動(dòng)駕駛雙4D成像毫米波數(shù)據(jù)集Dual Radar,采集非理想工況感知數(shù)據(jù)總里程超過400公里,標(biāo)注三維目標(biāo)檢測(cè)和跟蹤的數(shù)據(jù)超過10000幀同步幀,用于評(píng)測(cè)現(xiàn)有感知算法在真實(shí)非理想工況數(shù)據(jù)上的性能表現(xiàn)。相關(guān)研究成果以“Dual Radar: a Multi-modal Dataset with Dual 4D Radar for Autononous Driving”為題發(fā)表在Scientific Data上,該期刊專注于發(fā)表具有科學(xué)價(jià)值的數(shù)據(jù)集。北京理工大學(xué)助理教授王力為本文通信作者。
自動(dòng)駕駛系統(tǒng)的環(huán)境感知是確保安全性和可靠性的核心,但現(xiàn)有的傳感器技術(shù)在復(fù)雜多變的駕駛環(huán)境中仍面臨許多挑戰(zhàn)。4D毫米波雷達(dá)具有比傳統(tǒng)3D雷達(dá)更高的點(diǎn)云密度和精確的垂直分辨率,使其在自動(dòng)駕駛環(huán)境感知中的不利情況下具有前景。目前,自動(dòng)駕駛領(lǐng)域還缺乏對(duì)4D毫米波雷達(dá)不同點(diǎn)云密度和噪聲水平的比較分析,現(xiàn)有數(shù)據(jù)集基于單一類型的4D毫米波雷達(dá),在同一場(chǎng)景中難以兼顧長(zhǎng)距離點(diǎn)云數(shù)據(jù)和廣視野點(diǎn)云數(shù)據(jù),無法進(jìn)行點(diǎn)云密度和噪聲水平的直接對(duì)比。為了應(yīng)對(duì)這一問題,研究團(tuán)隊(duì)提出了一個(gè)新的數(shù)據(jù)集Dual Radar,通過引入兩種特性不同的4D雷達(dá),來實(shí)現(xiàn)對(duì)長(zhǎng)距離和廣視野性能迥異的雷達(dá)數(shù)據(jù)綜合分析,推動(dòng)自動(dòng)駕駛在惡劣天氣、復(fù)雜光照等環(huán)境感知技術(shù)的發(fā)展。
Dual Radar數(shù)據(jù)集的采集車輛如圖1所示,包含了四種傳感器,分別為高分辨率相機(jī)、激光雷達(dá)和兩種不同類型的4D雷達(dá):Arbe Phoenix和ARS548 RDI,具體參數(shù)配置如表1所示。該數(shù)據(jù)集共包含151個(gè)連續(xù)時(shí)間序列,涵蓋了10007個(gè)同步標(biāo)注幀,數(shù)據(jù)集的類別包括汽車、行人、騎行者,公交車、卡車和其他物體,類別數(shù)量和距離分布如圖2所示。該數(shù)據(jù)集涵蓋了多個(gè)具有挑戰(zhàn)性的場(chǎng)景,包括:不同的道路條件(城市道路和隧道);不同的天氣條件:晴天、陰天和惡劣天氣(雨天等);不同的光照強(qiáng)度:正常光照和逆光;不同的時(shí)間段:白天、黃昏和夜間,三維目標(biāo)檢測(cè)標(biāo)注情況如圖3所示。這些場(chǎng)景的多樣性能夠幫助研究人員驗(yàn)證不同傳感器在各種環(huán)境下的表現(xiàn),并為自動(dòng)駕駛系統(tǒng)提供更全面的測(cè)試數(shù)據(jù)。

圖1 Dual Radar數(shù)據(jù)采集車及各數(shù)據(jù)目標(biāo)檢測(cè)標(biāo)注情況(分別為圖像、激光雷達(dá)點(diǎn)云、Arbe Phoenix點(diǎn)云和ARS548 RDI點(diǎn)云)
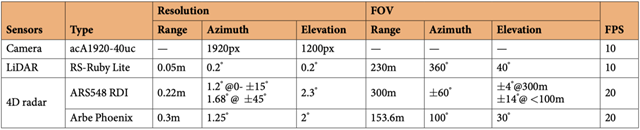
表1 車載傳感器參數(shù)配置
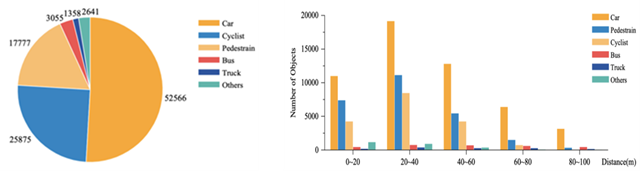
圖2 多類別目標(biāo)數(shù)量統(tǒng)計(jì)和目標(biāo)距離分布統(tǒng)計(jì)
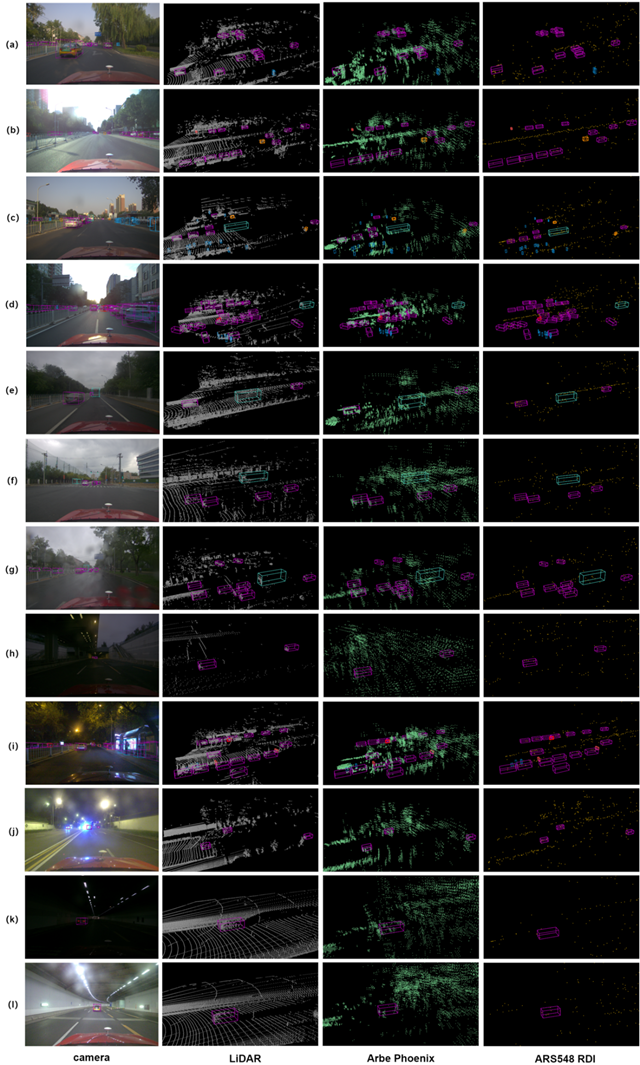
圖3 Dual Radar數(shù)據(jù)集三維目標(biāo)檢測(cè)標(biāo)注可視化
該數(shù)據(jù)集的兩個(gè)不同類型的雷達(dá)傳感器:Arbe Phoenix雷達(dá)和ARS548 RDI雷達(dá),能夠收集不同類型的點(diǎn)云數(shù)據(jù)。其中,ArbePhoenix雷達(dá)具有較高的點(diǎn)云密度,能夠提供更廣的視野覆蓋,盡管存在較多噪聲,但它能夠捕捉到更多的物體信息,尤其在檢測(cè)大型物體(如汽車)時(shí)表現(xiàn)突出。與Arbe Phoenix相比,ARS548 RDI雷達(dá)產(chǎn)生的噪聲較少,點(diǎn)云密度較低,但它在長(zhǎng)距離探測(cè)中表現(xiàn)更為精準(zhǔn),特別適合檢測(cè)遠(yuǎn)距離或較小物體(如行人和自行車)。數(shù)據(jù)幀的點(diǎn)云數(shù)量統(tǒng)計(jì)結(jié)果如圖4所示。通過對(duì)比這兩種雷達(dá)點(diǎn)云的密度與噪聲水平,研究團(tuán)隊(duì)驗(yàn)證了雙4D雷達(dá)在多種駕駛場(chǎng)景下的優(yōu)異表現(xiàn),特別是在復(fù)雜環(huán)境中,雙雷達(dá)融合顯著提高了物體檢測(cè)與跟蹤的準(zhǔn)確性。該數(shù)據(jù)集不僅解決了傳統(tǒng)技術(shù)中的點(diǎn)云稀疏和噪聲問題,還為自動(dòng)駕駛感知算法提供了寶貴的測(cè)試數(shù)據(jù),特別是在多模態(tài)傳感器數(shù)據(jù)融合任務(wù)中的應(yīng)用。
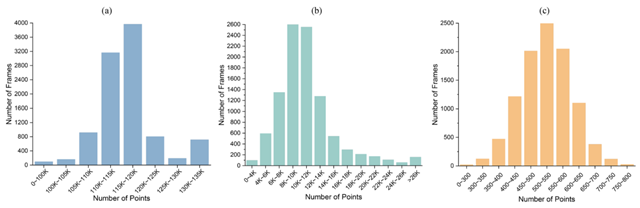
圖4 數(shù)據(jù)幀的點(diǎn)云數(shù)量統(tǒng)計(jì)。(a)顯示大多數(shù)激光雷達(dá)點(diǎn)云數(shù)量在110K 和120K 之間。(b)顯示Arbe Phoenix 點(diǎn)云數(shù)量在6K 和14K 之間。(c) 顯示ARS548 RDI 點(diǎn)云數(shù)量在400 和650 之間。
研究團(tuán)隊(duì)的這項(xiàng)工作中數(shù)據(jù)涵蓋惡劣天氣(雨霧)、弱光晝夜、背光逆光等傳統(tǒng)數(shù)據(jù)集未充分覆蓋的挑戰(zhàn)性環(huán)境,填補(bǔ)了現(xiàn)有數(shù)據(jù)集在極端條件下的空白,可為自動(dòng)駕駛領(lǐng)域的感知技術(shù)發(fā)展提供了新的數(shù)據(jù)支持,尤其是在提升自動(dòng)駕駛車輛在復(fù)雜環(huán)境中全天候可靠性和安全性方面,具有較好的應(yīng)用潛力,有望推動(dòng)自動(dòng)駕駛感知系統(tǒng)向低成本、高魯棒、全場(chǎng)景方向跨越式發(fā)展。
論文鏈接:https://www.nature.com/articles/s41597-025-04698-2
數(shù)據(jù)集及代碼下載鏈接:https://github.com/adept-thu/Dual-Radar
分享到: