北理工團(tuán)隊在機(jī)器人-動物交互領(lǐng)域取得重要進(jìn)展
發(fā)布日期:2024-12-06 供稿:機(jī)電學(xué)院 攝影:機(jī)電學(xué)院
編輯:任彥仙 審核:王成 閱讀次數(shù):
北京理工大學(xué)機(jī)電學(xué)院石青教授團(tuán)隊在機(jī)器人-動物交互領(lǐng)域取得重要進(jìn)展,12月5日,研究成果以“通過類鼠機(jī)器人調(diào)節(jié)大鼠情緒狀態(tài)(Modulating emotional states of rats through a rat-like robot with learned interaction patterns)”為題,以長文( Article)形式在線發(fā)表于自然子刊《自然·機(jī)器智能》 (Nature Machine Intelligence)。該成果首創(chuàng)了一種機(jī)器人-大鼠社交范式(圖1),展示了獨特的社交學(xué)習(xí)技能,實現(xiàn)了機(jī)器人與動物長時、重復(fù)和可控的開放式互動,克服了生物系統(tǒng)內(nèi)自然社會交互的局限性,為理解人類與人工智能之間的“社會”互動提供新思路。
機(jī)電學(xué)院石青教授為論文通訊作者,機(jī)電學(xué)院博士生賈廣祿為論文第一作者,北京理工大學(xué)是該論文第一完成單位,相關(guān)工作由機(jī)電學(xué)院與德國慕尼黑工業(yè)大學(xué)研究團(tuán)隊合作完成。
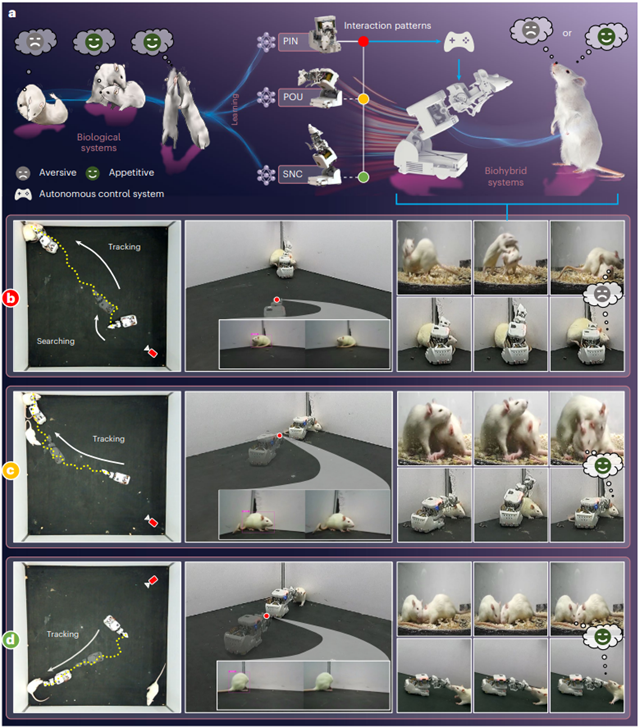
圖1 類鼠機(jī)器人通過多種學(xué)到的交互模式與大鼠互動并調(diào)節(jié)其情緒狀態(tài)
近年來,機(jī)器人作為社交伙伴融入生物系統(tǒng),已經(jīng)成為研究動物行為與神經(jīng)內(nèi)在機(jī)制的重要工具,可以作為觀察者和刺激物與動物互動,探索個體或集群動物如何對受控的環(huán)境變化做出反應(yīng),甚至能夠跨物種和生態(tài)系統(tǒng)進(jìn)行信息傳遞。這種生物混合系統(tǒng)帶來了可控性,有助于闡明通過傳統(tǒng)技術(shù)無法揭示的潛在生物智能。然而,交互機(jī)器人仍然難以在生物系統(tǒng)中傳達(dá)多層異質(zhì)信息,有效調(diào)節(jié)復(fù)雜的交互過程面臨著巨大挑戰(zhàn):首先,與動物交流需要整合多種感官感知;其次,模仿多樣的復(fù)雜行為對于融入動物群體至關(guān)重要;此外,如何直接改變動物的內(nèi)部狀態(tài)(如情緒)尚未深入探索。目前,仍缺乏全面的解決方案。
從大鼠的解剖結(jié)構(gòu)、動態(tài)運動和社交互動中獲得靈感,該團(tuán)隊開發(fā)了一款小型類鼠交互機(jī)器人。通過關(guān)鍵運動關(guān)節(jié)映射模型,設(shè)計了高靈活多關(guān)節(jié)脊柱,具有幾乎與大鼠運動極限一致的運動空間,解決了機(jī)器人的復(fù)雜社交姿態(tài)表達(dá)難題。基于動物演示的模仿學(xué)習(xí)算法實現(xiàn)了四種社會行為模板生成,學(xué)習(xí)到的行為可以表現(xiàn)出大鼠的運動特征,具有高相對動態(tài)范圍指數(shù)和高動態(tài)相似性。與國際同類機(jī)器人相比,在移動速度、體長、仿生外觀、運動能力等方面更接近大鼠,綜合性能更優(yōu)(圖2)。
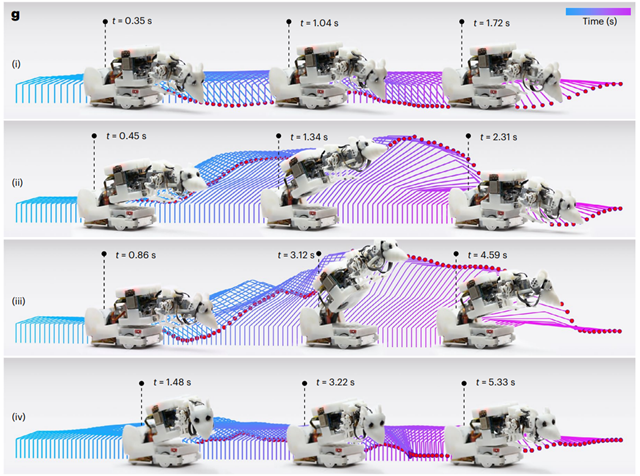
圖2 類鼠機(jī)器人模仿大鼠典型社會行為
團(tuán)隊建立了可自定義交互規(guī)則的自動控制系統(tǒng),突破了視覺感知、目標(biāo)跟蹤和行為決策等多項核心技術(shù),使機(jī)器人能夠根據(jù)預(yù)定義的任務(wù)目標(biāo)與大鼠自主交互,大大提高了交互效率,實現(xiàn)了半小時內(nèi)平均30次持續(xù)互動。進(jìn)一步,通過三種預(yù)設(shè)的交互模式與大鼠進(jìn)行持續(xù)半小時不知疲倦的互動,實驗結(jié)果標(biāo)明大鼠可以區(qū)分不同的機(jī)器人的意圖和活動并做出相應(yīng)的行為和聲學(xué)反應(yīng)。特別是,機(jī)器人按住大鼠時(pinning)使其處于一種消極的情緒狀態(tài);機(jī)器人攀壓或鼻尖接觸大鼠時(pouncing和social nose contact)使其處于一種積極的情緒狀態(tài)。這項工作有望幫助揭示感官感知、行為決策和內(nèi)部狀態(tài)之間復(fù)雜的相互作用,以及這些決策或預(yù)測背后的大腦功能和神經(jīng)回路機(jī)制。
圖3 與類鼠機(jī)器人社交互動實驗后的大鼠表現(xiàn)出不同行為和聲學(xué)反應(yīng)
團(tuán)隊未來將繼續(xù)探索使用多種感知反饋和行為模式在更長的時間內(nèi)控制大鼠的內(nèi)部狀態(tài),擴(kuò)展行為模式的“學(xué)習(xí)空間”,并泛化到更大的群體,助力機(jī)器人、行為神經(jīng)科學(xué)和可解釋的人工智能發(fā)展。
論文鏈接:https://www.nature.com/articles/s42256-024-00939-y
附團(tuán)隊介紹:
北理工微小型仿生機(jī)器人團(tuán)隊依托機(jī)電學(xué)院,面向世界前沿,在微小型仿生機(jī)器設(shè)計、感知、控制等方面已開展了一系列研究,相關(guān)成果發(fā)表在Nature Machine Intelligence、PNAS、IEEE Transactions on Robotics等國際知名期刊。
分享到: