北理工微納生物操作團(tuán)隊(duì)在微納機(jī)器人與生物醫(yī)學(xué)工程領(lǐng)域取得重要進(jìn)展
發(fā)布日期:2021-01-20 供稿:機(jī)電學(xué)院 攝影:機(jī)電學(xué)院
編輯:韓璐媛 審核:王亞斌 閱讀次數(shù):北京理工大學(xué)智能機(jī)器人研究所黃強(qiáng)教授與王化平副教授的微納生物操作團(tuán)隊(duì)在微納機(jī)器人與生物醫(yī)學(xué)工程領(lǐng)域取得重要進(jìn)展,1月18日,該研究成果“面向環(huán)境自適應(yīng)定位、采樣與釋放的離子響應(yīng)形變微機(jī)器人執(zhí)行器”(Ionic shape-morphing microrobotic end-effectors for environmentally adaptive targeting, releasing, and sampling),以研究長文(Research Article)形式在線發(fā)表于自然子刊《自然?通訊》 (Nature Communications)。該成果首創(chuàng)了以單一可降解生物材料實(shí)現(xiàn)微機(jī)器人在環(huán)境感知下的自形變,從而解決了微機(jī)器人在人體等活體封閉環(huán)境下進(jìn)行無創(chuàng)采樣、運(yùn)輸、投遞與回收等一體化作業(yè)的難題,這將在癌癥等重大疾病精準(zhǔn)醫(yī)療領(lǐng)域產(chǎn)生深遠(yuǎn)意義。
高精尖中心、機(jī)電學(xué)院黃強(qiáng)教授與王化平副教授為論文通訊作者,博士生鄭志強(qiáng)為論文第一作者,石青教授、董立新教授等全程參與了研究工作。北京理工大學(xué)是該論文唯一完成單位。
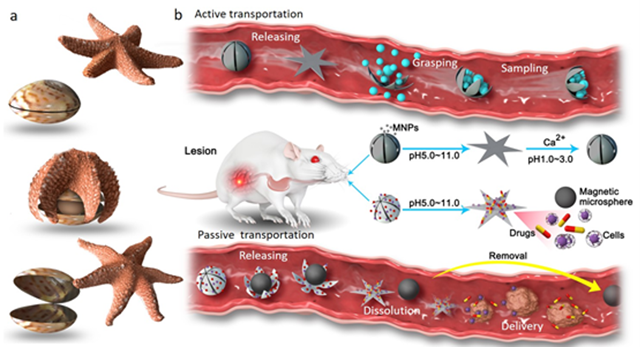
圖1 環(huán)境感知自形變微機(jī)器人在動(dòng)物體內(nèi)作業(yè)機(jī)理示意圖及研究思路
面對(duì)癌癥發(fā)病率日益增高的現(xiàn)實(shí),科學(xué)家們一直致力于開發(fā)微機(jī)器人取代傳統(tǒng)手術(shù),實(shí)現(xiàn)無創(chuàng)病理采樣、藥物精準(zhǔn)投放等功能,為患者提供更為安全、直接、有效的治療方式。目前,微機(jī)器人的運(yùn)動(dòng)與形變大多通過人為提供驅(qū)動(dòng)力和形變刺激源遙控實(shí)現(xiàn),整個(gè)過程需要實(shí)時(shí)監(jiān)測(cè)機(jī)器人的位置與狀態(tài),以便確認(rèn)何時(shí)何地發(fā)送形變指令開展作業(yè)。鑒于人體等活體環(huán)境實(shí)時(shí)監(jiān)測(cè)手段與反饋信息的局限性,開發(fā)具有自主形變功能的智能化微機(jī)器人,對(duì)于有效減少人為介入、大幅提升活體作業(yè)的可行性與靈活性具有重要意義。
生物環(huán)境感知——讓微機(jī)器人“智能化”
該團(tuán)隊(duì)發(fā)現(xiàn)褐藻酸水凝膠在非均一電沉積交聯(lián)固化后具有不同局部密度,受離子濃度、pH值變化的激勵(lì)可進(jìn)一步發(fā)生交聯(lián)或分解反應(yīng)從而積累局部應(yīng)變,在整體結(jié)構(gòu)上展現(xiàn)為形變與開合。由于離子、pH均為人類等活體中天然存在的環(huán)境,該發(fā)現(xiàn)激發(fā)了團(tuán)隊(duì)研發(fā)具有生物環(huán)境感知自主形變微機(jī)器人的靈感。
受海星捕食貝類運(yùn)動(dòng)過程的啟發(fā),團(tuán)隊(duì)以該非均一化水凝膠構(gòu)建了仿海星微機(jī)器人,使其柔性觸手能夠在液體環(huán)境下以自主形變有效貼合任意目標(biāo)的外部輪廓進(jìn)行抓取與釋放。通過非均勻電場(chǎng)交聯(lián)固化,具有不同密度的水凝膠網(wǎng)絡(luò)被嵌入到仿海星微機(jī)器人的褐藻酸單層薄膜結(jié)構(gòu)中,在微機(jī)器人進(jìn)入人體等活體消化系統(tǒng)后,即能感應(yīng)pH環(huán)境(胃pH:1-3、腸道pH:6-8)自主形變。
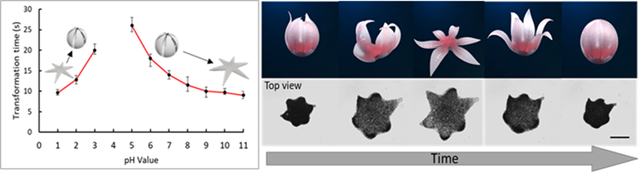
圖2 仿海星微機(jī)器人在pH環(huán)境感知下的自主形變(比例尺:500μm)
多模驅(qū)動(dòng)與生物降解——讓微機(jī)器人“多元化”
仿海星微機(jī)器人可模仿海星的多種驅(qū)動(dòng)模式。如通過捕獲磁性微球,以“搭便車”的形式隨磁球在磁場(chǎng)作用下被動(dòng)運(yùn)動(dòng),或通過機(jī)器人體內(nèi)封裝磁性納米材料實(shí)現(xiàn)磁驅(qū)主動(dòng)運(yùn)動(dòng)。最后,在到達(dá)目標(biāo)區(qū)域后,通過自主形變調(diào)整姿態(tài)完成貼附、投遞、采樣等不同作業(yè)任務(wù)。這種由水凝膠單一材料構(gòu)建的全新微機(jī)器人還具有完全的生物可降解性,能夠解決活體封閉環(huán)境下完成作業(yè)后的回收難題。
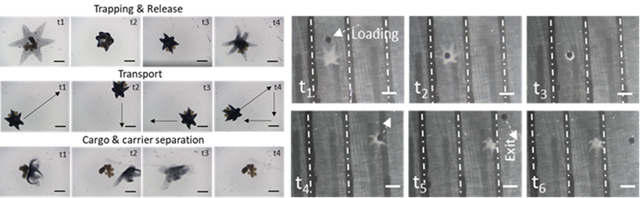
圖3 微機(jī)器人在主動(dòng)式、被動(dòng)式運(yùn)動(dòng)下作業(yè)(比例尺:500μm)
通過有效利用這種水凝膠網(wǎng)絡(luò)定制化嵌入策略,團(tuán)隊(duì)未來將繼續(xù)探索任意形貌單層自主形變微機(jī)器人結(jié)構(gòu)的剪裁技術(shù),為微機(jī)器人模仿生物世界各種軟體形變鋪平新的道路,為復(fù)雜封閉活體環(huán)境下的自適應(yīng)精密生物微操作提供使能支撐,在未來如心腦血管溶栓、潰瘍性結(jié)腸炎、腫瘤等病灶藥物長效釋放等精準(zhǔn)醫(yī)療與組織修復(fù)等方面實(shí)現(xiàn)微機(jī)器人形態(tài)與功能的多元化。
附團(tuán)隊(duì)介紹:
北理工生物微納操作團(tuán)隊(duì)依托機(jī)電學(xué)院和高精尖中心,面向世界前沿,在微納機(jī)器人、微納生物制造等方面已開展了一系列研究,相關(guān)成果發(fā)表在Nature Communications,ACS Applied Materials & Interfaces,Lab on a Chip、Biofabrication、IEEE Trans匯刊等國際知名期刊。此次論文以研究生作為唯一第一作者,由本團(tuán)隊(duì)與名古屋等國際知名高校聯(lián)合培養(yǎng),展現(xiàn)了團(tuán)隊(duì)圍繞科技前沿的國際化人才培養(yǎng)模式積極探索取得階段性進(jìn)展。同時(shí),表明了團(tuán)隊(duì)在微納機(jī)器人技術(shù)領(lǐng)域的研究在國際上的影響力穩(wěn)步提升。
論文下載地址:https://www.nature.com/articles/s41467-020-20697-w
分享到: