北理工團(tuán)隊(duì)在多柔體系統(tǒng)動(dòng)力學(xué)研究方面取得系列進(jìn)展
發(fā)布日期:2022-05-26 供稿:宇航學(xué)院
編輯:趙亞康 審核:龍騰 閱讀次數(shù):近日,北理工胡海巖院士領(lǐng)導(dǎo)的空間結(jié)構(gòu)動(dòng)力學(xué)與控制研究團(tuán)隊(duì)分別在軟體機(jī)器人動(dòng)力學(xué)、人體多體動(dòng)力學(xué)、繩網(wǎng)捕獲動(dòng)力學(xué)、多柔體動(dòng)力學(xué)算法等方向取得突破。

圖1 軟抓手實(shí)現(xiàn)空間快速捕獲概念圖
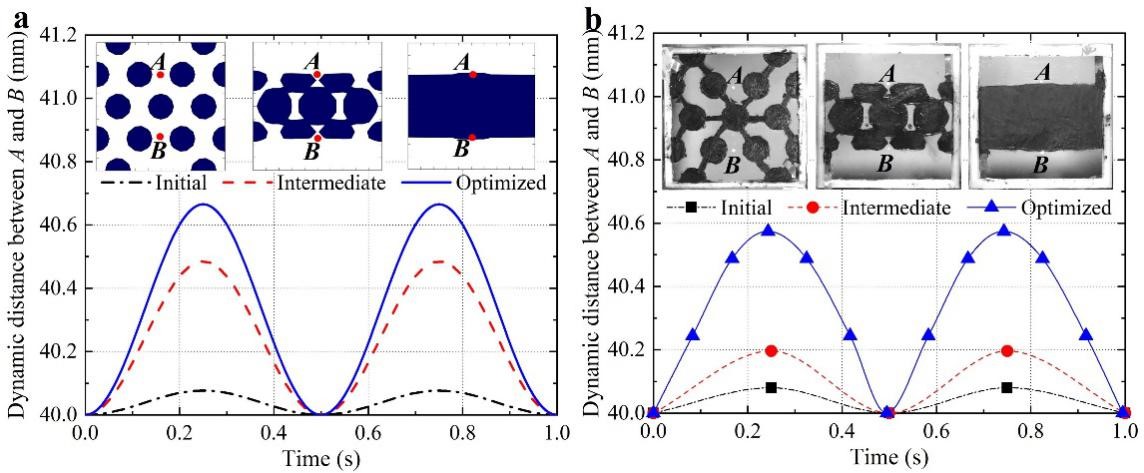
圖2 介電彈性體軟作動(dòng)器電極拓?fù)鋬?yōu)化:(a) 計(jì)算結(jié)果; (b) 實(shí)驗(yàn)結(jié)果
軟體機(jī)器人是含軟材料部件的多柔體系統(tǒng),具有較高的環(huán)境適應(yīng)性和交互安全性。針對(duì)空間結(jié)構(gòu)快速組裝問(wèn)題,團(tuán)隊(duì)羅凱助理教授等提出了基于雙穩(wěn)態(tài)軟抓手的快速捕獲方案(圖1),該軟抓手可通過(guò)調(diào)節(jié)穩(wěn)態(tài)躍遷的能量勢(shì)壘,實(shí)現(xiàn)對(duì)不同狀態(tài)目標(biāo)的抓捕適應(yīng)性調(diào)整。進(jìn)一步,針對(duì)軟作動(dòng)器動(dòng)態(tài)設(shè)計(jì)問(wèn)題,提出了介電彈性體軟作動(dòng)器的電極拓?fù)鋬?yōu)化方法(圖2)。相關(guān)兩篇論文發(fā)表于機(jī)器人領(lǐng)域頂級(jí)期刊《Soft Robotics》(Y. Liu, K. Luo* et al. DOI: 10.1089/soro.2021.0147, 2022; P. Zhang, Z. Yan, K. Luo*, Q. Tian*. DOI: 10.1089/soro.2021.0169, 2022)。這是北京理工大學(xué)宇航學(xué)院研究成果首次在該期刊上發(fā)表。
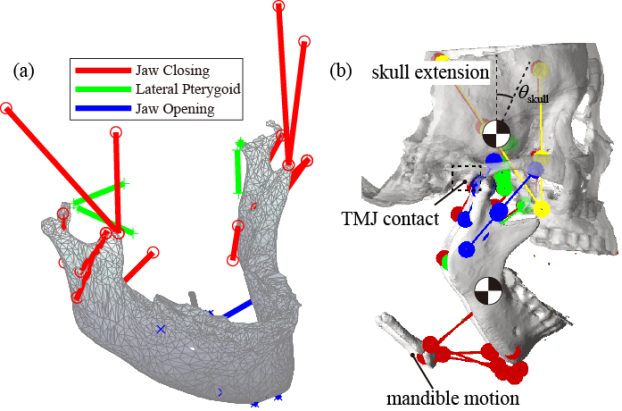
圖3 口頜肌骨系統(tǒng)個(gè)性化建模與大張口模擬
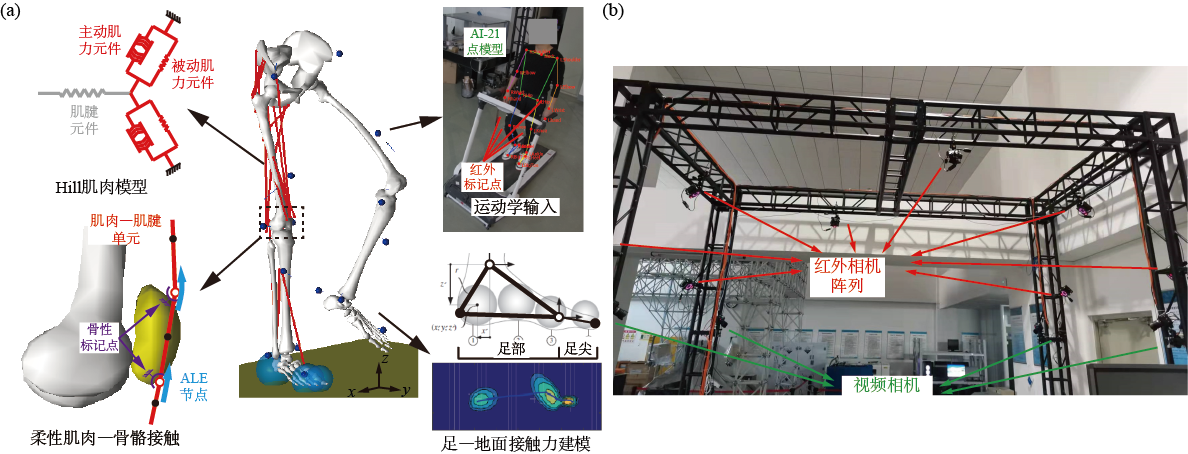
圖4 人體肌骨系統(tǒng)多體動(dòng)力學(xué)模擬與混合動(dòng)作捕捉實(shí)驗(yàn)平臺(tái)
人體肌骨系統(tǒng)也是典型的多柔體系統(tǒng),其動(dòng)力學(xué)與控制研究是動(dòng)力學(xué)與生物力學(xué)的新興交叉融合領(lǐng)域。在肌骨系統(tǒng)動(dòng)力學(xué)研究中,團(tuán)隊(duì)成員郭建嶠博士等提出了一套針對(duì)人體口頜系統(tǒng)的個(gè)性化動(dòng)力學(xué)建模方法(圖3),將多體動(dòng)力學(xué)應(yīng)用于口頜腫瘤手術(shù)規(guī)劃實(shí)踐。研究成果得到北大口腔醫(yī)院臨床應(yīng)用,相關(guān)論文已發(fā)表于生物力學(xué)頂級(jí)期刊《Journal of Biomechanics》(J. Guo et al. 139: 111143, 2022)。郭建嶠博士也受邀在《力學(xué)進(jìn)展》(郭建嶠等. 52(2): 1-58, 2022)上撰寫(xiě)了長(zhǎng)篇綜述論文,系統(tǒng)綜述了其在這一研究領(lǐng)域的研究成果(圖4)。2021年,郭建嶠博士還曾受邀在我國(guó)首屆“運(yùn)動(dòng)生物力學(xué)與體育科技促進(jìn)研討會(huì)”作大會(huì)報(bào)告。

(a) 空間繩網(wǎng)展開(kāi)動(dòng)力學(xué)仿真及實(shí)驗(yàn) (b) 空間機(jī)械臂消旋仿真及實(shí)驗(yàn)
圖5 空間碎片捕獲方法
空間碎片問(wèn)題日益嚴(yán)峻,如何安全地開(kāi)展碎片消旋與捕獲是研究難點(diǎn)與熱點(diǎn)。采用空間繩網(wǎng)和機(jī)械臂捕獲碎片是目前較為可行的捕獲方法(圖5)。針對(duì)空間繩網(wǎng)捕獲法,團(tuán)隊(duì)成員單明賀助理教授等基于多柔體動(dòng)力學(xué)絕對(duì)節(jié)點(diǎn)坐標(biāo)法構(gòu)建了“服務(wù)航天器-繩網(wǎng)-目標(biāo)”的組合體系統(tǒng)動(dòng)力學(xué)新模型,通過(guò)實(shí)驗(yàn)和計(jì)算相結(jié)合的研究思路,預(yù)測(cè)了系統(tǒng)的捕獲動(dòng)特性。對(duì)此類(lèi)欠驅(qū)動(dòng)系統(tǒng),單明賀等還提出了基于系繩拉力的目標(biāo)消旋控制算法,構(gòu)建了末端執(zhí)行器與目標(biāo)的接觸動(dòng)力學(xué)模型,采用混合力位控制方法成功對(duì)目標(biāo)碎片進(jìn)行消旋。相關(guān)論文已發(fā)表于《Aerospace》(M. Shan, L. Shi. 9: 33, 2022),《Acta Astronautica》(L. Shi, X. Xiao, M. Shan* et al. 193: 469-482, 2022)。研究成果已經(jīng)被我國(guó)航天部門(mén)應(yīng)用于繩網(wǎng)捕獲系統(tǒng)的設(shè)計(jì)。在多柔體動(dòng)力學(xué)建模研究方面,團(tuán)隊(duì)成員韓石磊副教授基于對(duì)偶四元數(shù)、變域哈密頓變分原理提出了系列可用于多柔體動(dòng)力學(xué)分析的新有限單元,可實(shí)現(xiàn)系統(tǒng)高效建模和計(jì)算,研究成果發(fā)表于計(jì)算力學(xué)頂級(jí)期刊《Computer Methods in Applied Mechanics and Engineering》(S. Han. 395: 115063, 2022),獲同行專(zhuān)家高度評(píng)價(jià)。此外,團(tuán)隊(duì)博士生王帥等提出了基于立方形星群組裝的空間碎片清除與防護(hù)技術(shù)方案,獲得了世界大學(xué)生立方星挑戰(zhàn)賽中國(guó)區(qū)總決賽特等獎(jiǎng)(圖6)。
圖6 世界大學(xué)生立方星挑戰(zhàn)賽中國(guó)區(qū)總決賽特等獎(jiǎng)證書(shū)
宇航學(xué)院空間結(jié)構(gòu)動(dòng)力學(xué)與控制實(shí)驗(yàn)室,由胡海巖院士于2009年創(chuàng)建,現(xiàn)有教授3人,副教授1人,助理教授2人,博士后3人。2016年,胡海巖院士受邀在第24屆世界力學(xué)家大會(huì)(力學(xué)奧運(yùn)會(huì))介紹了團(tuán)隊(duì)在多柔體系統(tǒng)動(dòng)力學(xué)方面的研究成果,并獲得眾多國(guó)際著名力學(xué)家高度評(píng)價(jià)。2021年,團(tuán)隊(duì)田強(qiáng)教授獲得了國(guó)家杰出青年科學(xué)基金項(xiàng)目資助。最近,胡海巖教授在第195屆匈牙利科學(xué)院院士大會(huì)上當(dāng)選為該院外籍院士,是此次在工程科學(xué)領(lǐng)域當(dāng)選的唯一外籍院士。
分享到: