【新聞特寫】靈巧“機器鼠”挑戰(zhàn)創(chuàng)新
——北京理工大學(xué)機電學(xué)院完成第十屆首都“挑戰(zhàn)杯”申報工作
發(fā)布日期:2019-08-21 供稿:機電學(xué)院 攝影:機電學(xué)院
編輯:鄧巖 審核:王偉 王征 閱讀次數(shù):
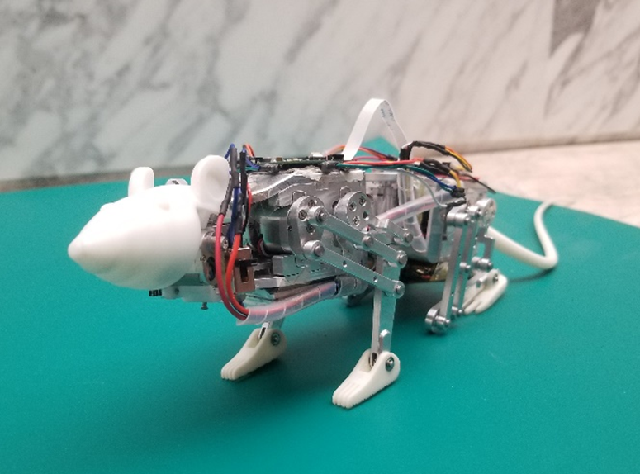
“腳步靈活,或走或爬,頭部腰部根據(jù)需要可以進行扭動,還可以負重前行.......”機電學(xué)院王圣杰談起自己的創(chuàng)新作品來,一臉自豪。這只"靈巧鼠"是2019年北理工參加首都“挑戰(zhàn)杯”大學(xué)生課外學(xué)術(shù)科技作品競賽的作品之一。
“挑戰(zhàn)杯”首都大學(xué)生課外學(xué)術(shù)科技作品競賽創(chuàng)辦以來,在推動廣大高校學(xué)生參與學(xué)術(shù)科技實踐、發(fā)現(xiàn)和培育創(chuàng)新型人才、深化高校素質(zhì)教育等方面發(fā)揮了積極作用,集中展示了高校育人成果,體現(xiàn)了鮮明的導(dǎo)向性、示范性和群眾性,在高校和社會上產(chǎn)生了廣泛、良好的影響。5月7日,北京理工大學(xué)六名學(xué)生在指導(dǎo)教師石青的帶領(lǐng)下正式完成了第十屆首都“挑戰(zhàn)杯”的申報工作,申報項目為《腿足型仿生靈巧鼠設(shè)計與實現(xiàn)》。參賽作品類別為科技發(fā)明制作A類,即科技含量高、制作投入大的作品。
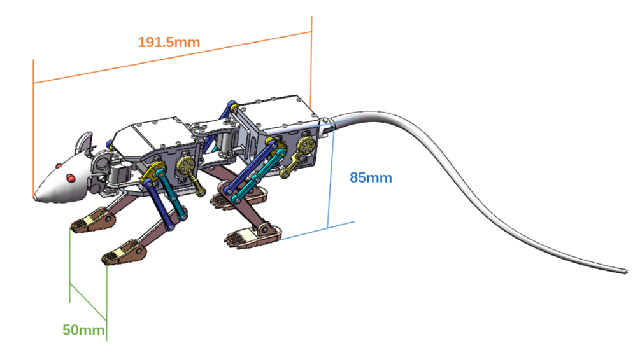
本項目機器鼠全身共12個主動自由度(腰部2個,單腿2個,頭部2個),4個足端被動自由度,機器鼠鼠長度200mm(無尾),寬度為50mm,總重量358g(包括電氣部件),實現(xiàn)了高度的集成化和輕量化設(shè)計。
該項目提出了雙平行四桿和高靈活連桿驅(qū)動的傳動方法,實現(xiàn)了仿生腿足結(jié)構(gòu)的精巧設(shè)計和柔性腰部結(jié)構(gòu)的優(yōu)化設(shè)計,為狹窄空間內(nèi)探測提供了重要基礎(chǔ);同時提出了基于PSO的CPG優(yōu)化網(wǎng)絡(luò)步態(tài)調(diào)整方法,實現(xiàn)了行走、小跑、跳躍等多種步態(tài)及其轉(zhuǎn)換,為靈巧運動的實現(xiàn)提供支撐;基于以上方法研制的本機器鼠可實現(xiàn)屈膝到站立、直行、扭轉(zhuǎn)、匍匐前進等多種模態(tài)。
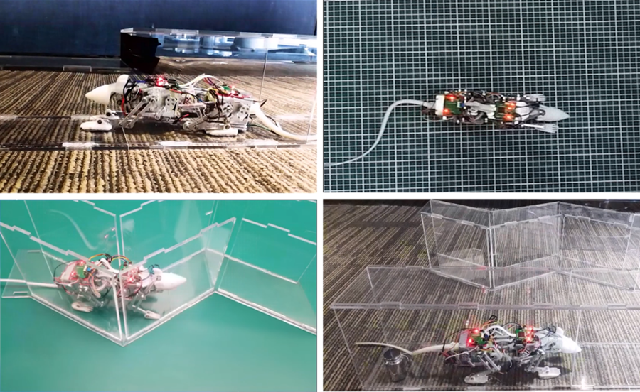
相較于國內(nèi)外研制的各類小型四足機器人,本項目機器鼠體型小、重量輕能夠?qū)崿F(xiàn)匍匐前進從而適合在變徑的不規(guī)則狹窄空間偵察。且本項目機器鼠能在負重200g情況下平穩(wěn)運動,相當(dāng)于自身體重的60%,運輸能力較強。兩者結(jié)合使得本項目機器鼠能夠在狹窄空間內(nèi)負載運行,從而在搶險救災(zāi)中為救援人員傳送小型檢測設(shè)備或被困人員運輸藥物、水等必需品。本項目實現(xiàn)了仿生腿足結(jié)構(gòu)的精巧設(shè)計和柔性腰部結(jié)構(gòu)的優(yōu)化設(shè)計,從而在運動能力上優(yōu)于現(xiàn)有交互機器鼠,運動速度達到15cm/s,轉(zhuǎn)彎半徑小至6cm且能實現(xiàn)扭轉(zhuǎn),因而能夠模擬更多真實鼠模態(tài)。

“崇尚科學(xué)、追求真知、勤奮學(xué)習(xí)、銳意創(chuàng)新、迎接挑戰(zhàn)”這是“挑戰(zhàn)杯”自創(chuàng)辦以來始終堅持的宗旨。帶著對科學(xué)和知識的敬畏之心,北京理工大學(xué)機電學(xué)院的學(xué)子聚集到了一起,從清晨到日暮,圖書館、實驗室充斥著他們的身影。抱著對創(chuàng)新的渴望,他們銳意前行,不懼挑戰(zhàn),成功完成了這項出色的科技發(fā)明。理論與實踐相結(jié)合,這是每一個專業(yè)課老師不斷強調(diào)的話題,也是每個理工學(xué)子不斷奮斗的目標。實踐值得提倡,創(chuàng)新值得鼓勵,發(fā)明值得表彰,希望這個參賽項目能在“挑戰(zhàn)杯”上取得好成績,展現(xiàn)出理工學(xué)子的科技風(fēng)采。
分享到: