【人物特寫】鄭志強:造納米海星機器人、組裝肝臟!
發(fā)布日期:2022-03-02 供稿:黨委宣傳部 崔雨涵 攝影:本人提供
編輯:吳楠 審核:藺偉 閱讀次數(shù):【編者按】2022年是黨的二十大召開之年,是實施“十四五”規(guī)劃關(guān)鍵之年,黨委宣傳部特別推出“喜迎二十大,奮進(jìn)新征程”專題報道,全面展現(xiàn)學(xué)校加強黨的領(lǐng)導(dǎo)黨的建設(shè)取得的成績,生動講好北理工人的奮斗故事,廣泛凝聚學(xué)校事業(yè)發(fā)展的磅礴力量,以優(yōu)異成績迎接二十大召開。

他勤奮好學(xué)、踏實努力,榮獲北京理工大學(xué)徐特立獎學(xué)金、北京市優(yōu)秀畢業(yè)生等各類表彰十余項,發(fā)表機器人領(lǐng)域?qū)W術(shù)論文15篇,以唯一第一作者在《Nature Communications》發(fā)表論文1篇,申請授權(quán)美國專利1項、PCT國際專利1項、國家發(fā)明專利3項,受邀參加2018年第八屆IEEE國際自動化、控制網(wǎng)絡(luò)技術(shù)會議并作邀請報告,他是機電學(xué)院2017級博士研究生鄭志強。
微型海星機器人,精準(zhǔn)醫(yī)療新未來
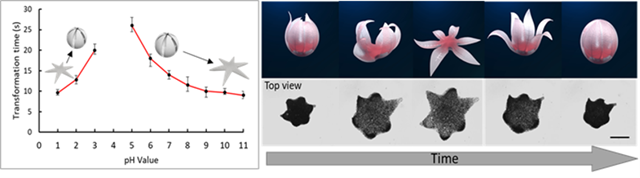
鄭志強的研究成果、仿海星微機器人在pH環(huán)境感知下的自主形變
“每次看到顯微鏡下小機器人的舒展與收縮,我的心情總是無比喜悅。于我而言,它們不僅僅是細(xì)胞的生長,而是代表著磁控機器人研究的更多可能,也代表了機器人技術(shù)未來發(fā)展的更多可能。”面對癌癥發(fā)病率的日益增高,科研人員一直致力于設(shè)計并制造一種微機器人取代傳統(tǒng)手術(shù),在人體內(nèi)部完成無創(chuàng)病理采樣、藥物精準(zhǔn)投放等一系列醫(yī)療任務(wù),為患者提供更為安全、高效、無痛的治療方式。憑借自己交叉學(xué)科的背景優(yōu)勢和對生物材料與微納機器人之間微妙聯(lián)系的獨到理解,鄭志強立志要構(gòu)建一種結(jié)合生物材料知識的微納機器人加工方法和理論。博士一年級時,他到香港城市大學(xué)開展了為期一個月的考察和調(diào)研,在一次實驗中,發(fā)現(xiàn)微電極的邊界效應(yīng)會造成水凝膠微結(jié)構(gòu)發(fā)生機械特性非均質(zhì)演變,這一發(fā)現(xiàn)讓他欣喜若狂。這意味著他可以通過設(shè)計電場的形狀和強度使得水凝膠微結(jié)構(gòu)獲得包括復(fù)雜形變、環(huán)境自適應(yīng)、多運動模態(tài)等一系列自主響應(yīng)微環(huán)境的能力。
在后續(xù)的研究中,鄭志強受到海星捕食的啟發(fā),利用水凝膠非均質(zhì)演變的原理構(gòu)建了仿海星微機器人,其柔性觸手能夠在液體環(huán)境下,以自主形變有效貼合任意目標(biāo)的外部輪廓,并進(jìn)行抓取與釋放。仿海星微機器人是首個基于活體體液離子激勵的自主形變微機器人,鄭志強提出的基于機械特性非均質(zhì)演變的生物仿生微單元自形變方法,有效提升了形變微機器人的設(shè)計靈活性,可對任意形狀剪裁下的單層薄膜機器人賦予形變能力,使其能夠感知活體內(nèi)的離子環(huán)境而智能形變。該微機器人為復(fù)雜封閉活體環(huán)境下的自適應(yīng)精密生物微操作提供了技術(shù)支撐,為未來如心腦血管溶栓、潰瘍性結(jié)腸炎修復(fù)、腫瘤等病灶藥物的靶向投遞等精準(zhǔn)醫(yī)療與組織修復(fù)領(lǐng)域提供了智能化的操作工具。
2019年下半年,是鄭志強進(jìn)行實驗驗證的關(guān)鍵階段,也是發(fā)表論文、數(shù)據(jù)整理的重要時期。然而,突如其來的新冠肺炎疫情打亂了既定節(jié)奏,實驗在最關(guān)鍵的時候被迫按下了暫停鍵。他通過學(xué)校建立的線上交流平臺和遠(yuǎn)在國外的導(dǎo)師進(jìn)行密切交流,共同探討實驗計劃。在不斷地討論和交流中,鄭志強想到了目前實驗成果、由水凝膠單一材料構(gòu)建的全新微機器人因為材料具有完全的生物可降解性,因此可以解決微機器人在活體封閉的實驗環(huán)境下難以進(jìn)行回收的難題。
功夫不負(fù)有心人。2021年1月,鄭志強成功研發(fā)了具有環(huán)境離子響應(yīng)能力的智能形變單層薄膜微機器人,相關(guān)成果發(fā)表于Nature Communications。該成果首次提出了以單一可降解生物材料實現(xiàn)微機器人在環(huán)境感知下的自形變,有效解決了微機器人在人體等活體封閉環(huán)境下進(jìn)行無創(chuàng)采樣、運輸、投遞與回收等一體化作業(yè)的難題,對于癌癥等重大疾病精準(zhǔn)醫(yī)療具有重要意義。
不斷嘗試,完成再生醫(yī)療的新突破
鄭志強和團隊成員自主研發(fā)的電磁控制系統(tǒng)
“推動科研成果落地轉(zhuǎn)化,讓科研工作發(fā)揮更大作用。”部分肝移植和全肝移植是治療許多惡性、急性肝病的重要手段,然而肝供體的緊缺和龐大的治療需求是肝病治療長期難以解決的矛盾。通過微機器人進(jìn)行人工肝組織的功能仿生與結(jié)構(gòu)仿生一直以來被譽為行業(yè)內(nèi)的難題,經(jīng)過大量的文獻(xiàn)調(diào)研和實驗嘗試,并在課題組石青、王化平老師的統(tǒng)籌和指導(dǎo)下,鄭志強積極與304醫(yī)院、積水潭醫(yī)院合作,圍繞人工肝組織的功能仿生與結(jié)構(gòu)仿生這一難題,提出了多機器人跨域協(xié)同與流體動力學(xué)交互生物操作方法,以人工肝小葉微模塊為組裝對象,實現(xiàn)了肝組織的自動化三維集成組裝與生物功能表達(dá),突破了仿生人工肝組織機器人大規(guī)模集成組裝技術(shù)。該技術(shù)可以高效的加工和組裝仿生人工肝組織,這為肝臟的移植和修復(fù)提供了大量可再生的物質(zhì)基礎(chǔ)。
鄭志強還將由微機器人構(gòu)建的人工肝組織作為針對肝功能疾病的新藥測試以及病理研究的生物模型,同時在大鼠活體測試模型上進(jìn)行了藥毒性評估,經(jīng)驗證,兩者具有很高的生物功能匹配度,這意味著機器人化生物制造的仿生肝小葉組織有望替代動物成為新型的生物模型。目前,相關(guān)技術(shù)成果在多家生物公司得到應(yīng)用推廣。研究成果還獲得了3項國際學(xué)術(shù)獎勵,形成包括2項國際發(fā)明專利、3項國家發(fā)明專利的專利群。鄭志強的畢業(yè)論文獲評校級優(yōu)秀畢業(yè)論文,他本人獲評了北京市優(yōu)秀畢業(yè)生。
不忘初心,傳承北理工紅色基因

鄭志強(二排右四)和實驗室的同學(xué)在一起
“在微納的領(lǐng)域我是個“新手”,未來雖然有很多不確定性,但我堅信我會一直走下去。”本科就讀于河北工業(yè)大學(xué)生物工程專業(yè),碩士是英國諾丁漢大學(xué)生物材料理學(xué)專業(yè),具有多學(xué)科交叉學(xué)術(shù)背景的鄭志強在碩士畢業(yè)后,被北理工機電學(xué)院開放創(chuàng)新、兼容并濟的科研氛圍和機器人研究所強大的師資以及先進(jìn)的科研平臺深深吸引,他毅然選擇進(jìn)入北京理工大學(xué)機電學(xué)院微納機器人團隊繼續(xù)科研之路,并在此深受滋養(yǎng)。
依托北京理工大學(xué)國際交流平臺的支持,鄭志強與國外多所大學(xué)研究團隊開展了“超高速細(xì)胞組裝”課題研究,通過高精度微納操作機器人和快速視覺捕捉技術(shù),實現(xiàn)了對異質(zhì)/異構(gòu)粘彈性生物目標(biāo)的大規(guī)模集成組裝,顯著提高了機器人化生物微操作對復(fù)雜任務(wù)的適應(yīng)性。在Soft-bodied Magnetic Small-scale Mobile Robots國際會議上,鄭志強的成果得到了德國馬克思普朗克物理智能研究所所長、有磁控微機器人鼻祖之稱的M. Sitti教授的充分肯定。他也因此獲得馬克思普朗克研究所全額獎學(xué)金,赴德國馬克思普朗克物理智能研究所繼續(xù)后續(xù)的研究工作。
“心態(tài)與信念很重要,我也會有絕望低落的時候,但是我知道我想要的不是一次實驗的成功,也不是一篇論文的發(fā)表。作為北理工人,我深知科研之路沒有終點。心里有火,眼里有光,以理性之光澆灌科技之花,我希望自己可以掌握精深的學(xué)術(shù),做出對社會有價值的科研成果。”對于未來,鄭志強充滿決心與信心,他希望將來可以回到北理工教書育人,繼續(xù)微納機器人研究的科研事業(yè)。





