北理哪吒(BIT-NAZA)
——記北理工電動(dòng)并聯(lián)式輪足機(jī)器人
發(fā)布日期:2017-12-18 供稿:黨委宣傳部 王征、韓姍杉 攝影:自動(dòng)化學(xué)院
編輯:馬瑤 審核:金軍、包麗穎 閱讀次數(shù):
“上下顛倒”跳出華麗舞步
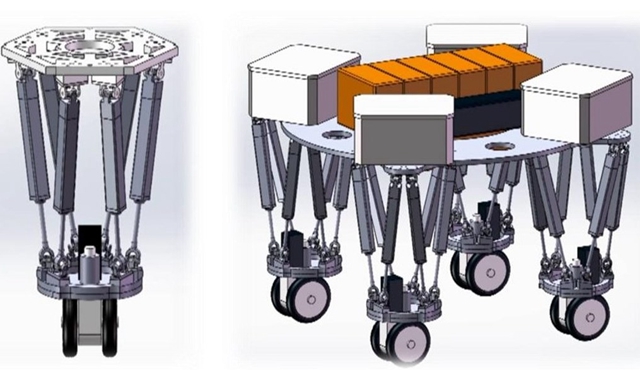
北理哪吒仿真模型
當(dāng)前,移動(dòng)機(jī)器人應(yīng)用領(lǐng)域的迅猛擴(kuò)展對(duì)其運(yùn)動(dòng)性能要求日益提高,要求機(jī)器人具有很好的運(yùn)動(dòng)速度、穩(wěn)定性、負(fù)載能力和地形適應(yīng)性,而單純的足式運(yùn)動(dòng)、履帶或輪式運(yùn)動(dòng)均難以同時(shí)滿足上述要求。
自動(dòng)化學(xué)院運(yùn)動(dòng)驅(qū)動(dòng)與控制研究團(tuán)隊(duì)曾在2010年參與了國(guó)家“863”計(jì)劃項(xiàng)目——液壓四足機(jī)器人協(xié)同驅(qū)動(dòng)控制研究。課題組的研究生們正是通過(guò)對(duì)四足機(jī)器人的研究,在指導(dǎo)教師的鼓勵(lì)和指導(dǎo)下,大膽提出了一個(gè)“顛覆”性的技術(shù)方案,即將通常使用的并聯(lián)式六自由度平臺(tái)“上下顛倒”,化“臺(tái)”為“腿”,并在“腿上”加裝輪足機(jī)構(gòu)。這一填補(bǔ)了國(guó)內(nèi)外四足機(jī)器人研究空白的方案,極具創(chuàng)新性,堪稱“北理工首創(chuàng)”。
然而,創(chuàng)新從來(lái)都不是空中樓閣,之所以能夠產(chǎn)生“上下顛倒”的創(chuàng)新想法,離不開(kāi)團(tuán)隊(duì)在并聯(lián)式多自由度平臺(tái)方面多年積累的研究?jī)?yōu)勢(shì),深厚的學(xué)術(shù)土壤,才讓同學(xué)們的創(chuàng)新種子得以開(kāi)花結(jié)果。
多自由度平臺(tái)就是一種完全再現(xiàn)物體在空間六個(gè)自由度運(yùn)動(dòng)的可控機(jī)械裝置,而這種再現(xiàn)還必須實(shí)現(xiàn)高精度、高頻響和高穩(wěn)定性等要求。另外,由于裝置中桿件之間還有相互影響,所以研究難度遠(yuǎn)遠(yuǎn)大于我們熟悉的機(jī)械手臂等串聯(lián)式平臺(tái)。而“北理哪吒”的每條單腿都是一個(gè)由6根電動(dòng)缸組成的六自由度平臺(tái),不僅要確保每條腿本身的運(yùn)動(dòng)協(xié)調(diào),還要考慮四條腿一起運(yùn)動(dòng)時(shí)的控制協(xié)調(diào),24根電動(dòng)缸的“和諧共處”,給項(xiàng)目帶來(lái)巨大挑戰(zhàn)。
“我們需要解決單腿的控制,四條腿的協(xié)調(diào)控制、減震設(shè)計(jì)以及環(huán)境感知等一系列問(wèn)題,才能真正實(shí)現(xiàn)機(jī)器人的自主判斷及自主控制,這也是為什么我們從提出思路到做出樣品中間做了那么長(zhǎng)時(shí)間仿真模擬的原因,需要考慮的檢測(cè)量和控制量實(shí)在是太多了。”說(shuō)起設(shè)計(jì)過(guò)程,團(tuán)隊(duì)中的劉冬琛同學(xué)不無(wú)感慨。
除了做好運(yùn)動(dòng)協(xié)調(diào),為腿上加裝輪足裝置,又是一個(gè)新的技術(shù)難點(diǎn)。加裝輪足裝置,可以讓機(jī)器人的通過(guò)性、靈活度等變得更強(qiáng),但在 “走路”的時(shí)候,卻需要有體積足夠小,質(zhì)量足夠輕的鎖死裝置將所有輪子鎖死,這是一個(gè)不小的難題,經(jīng)過(guò)長(zhǎng)時(shí)間的精確計(jì)算和多次仿真模擬,同學(xué)們才終于攻克這個(gè)問(wèn)題。
正是這種創(chuàng)新的“倒置”設(shè)計(jì),再穿上“風(fēng)火輪”,“北理哪吒”實(shí)現(xiàn)了輪式、足式和輪足復(fù)合式運(yùn)動(dòng),綜合起來(lái)能夠?qū)崿F(xiàn)輪式運(yùn)動(dòng)、原地轉(zhuǎn)動(dòng)、變輪距運(yùn)動(dòng)、變高度運(yùn)動(dòng)等10種“華麗舞步”,不僅能自由“走跑”,還能根據(jù)障礙情況,或“劈腿矮身”,或“旋轉(zhuǎn)滑步”,可謂靈活非凡。
威風(fēng)“哪吒”,功夫出在腿上
“這個(gè)機(jī)器人最大的特點(diǎn)是在腿上,就像腳踏風(fēng)火輪的哪吒一樣,風(fēng)風(fēng)火火,各種困難險(xiǎn)阻都能跨越。”說(shuō)起哪吒這一名字的由來(lái),指導(dǎo)教師王軍政教授笑稱道。談笑之間,卻點(diǎn)明了這款機(jī)器人最關(guān)鍵的環(huán)節(jié)就是出色的運(yùn)動(dòng)驅(qū)動(dòng)系統(tǒng)。
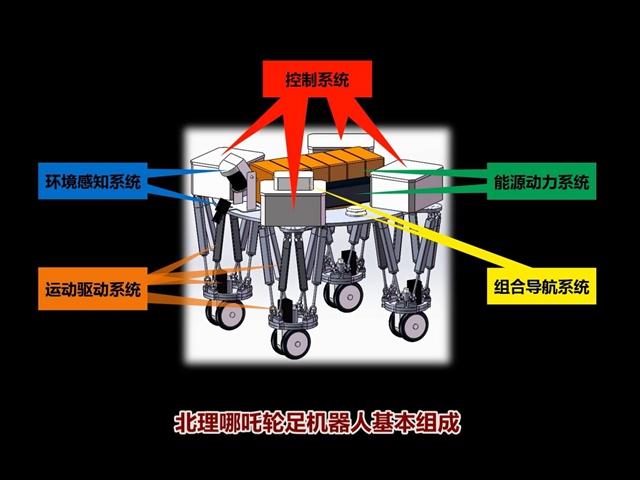
北理哪吒機(jī)器人基本組成
“北理哪吒”由運(yùn)動(dòng)驅(qū)動(dòng)系統(tǒng)和控制系統(tǒng)、環(huán)境感知系統(tǒng)、組合導(dǎo)航系統(tǒng)、能源動(dòng)力系統(tǒng)等組成。運(yùn)動(dòng)驅(qū)動(dòng)系統(tǒng)是“腿腳”,由一組組桿狀機(jī)構(gòu)組成,造型酷帥。外行看熱鬧,內(nèi)行看門道,殊不知,正是這一根根“桿件”才是“北理哪吒”的核心技術(shù)——一體化電動(dòng)缸。機(jī)器人實(shí)現(xiàn)靈活豐富的運(yùn)動(dòng)、大承載力和良好的主動(dòng)隔振效果,高功率密度一體化電動(dòng)缸是其中的關(guān)鍵。
不同于液壓缸和氣動(dòng)缸是依靠液、氣的壓力作為驅(qū)動(dòng)力,電動(dòng)缸依靠電機(jī)和絲杠等機(jī)械裝置,將伺服電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)轉(zhuǎn)換成直線運(yùn)動(dòng),具有高強(qiáng)度、高速度、高精度定位,運(yùn)動(dòng)平穩(wěn),低噪音等優(yōu)勢(shì)。自動(dòng)化學(xué)院運(yùn)動(dòng)驅(qū)動(dòng)與控制研究團(tuán)隊(duì)長(zhǎng)期以來(lái)依托軍工研究?jī)?yōu)勢(shì),不僅成為國(guó)內(nèi)最早開(kāi)展多自由度運(yùn)動(dòng)平臺(tái)的研究力量,并逐漸在一體化電動(dòng)缸方面形成研究?jī)?yōu)勢(shì),孕育一批重要的研究成果。
在此基礎(chǔ)上,團(tuán)隊(duì)學(xué)生們才能大膽創(chuàng)新,將這個(gè)“顛覆”方案從設(shè)想變作現(xiàn)實(shí),采用新型高功率密度一體化電動(dòng)缸,將電機(jī)軸與絲杠桿結(jié)構(gòu)合一,不僅外形更為緊湊,在驅(qū)動(dòng)能力方面也實(shí)現(xiàn)較大提升。
參加“挑戰(zhàn)杯”比賽期間吸引眾多觀眾
本次參加全國(guó)“挑戰(zhàn)杯”的“北理哪吒”,采用輪式滑行最大速度可達(dá)每小時(shí)30公里,輪距可在0.5米到1米之間調(diào)整,機(jī)身高度可在1.2米到1.5米之間調(diào)整,最大爬坡角度為25°。機(jī)器人四個(gè)輪子可獨(dú)立驅(qū)動(dòng),順、逆時(shí)針原地可旋轉(zhuǎn);在遇到障礙物時(shí),可自動(dòng)調(diào)整輪距和底盤高度實(shí)現(xiàn)越障。同時(shí),也可通過(guò)環(huán)境感知系統(tǒng)探測(cè)路徑,自動(dòng)實(shí)現(xiàn)直線、90度轉(zhuǎn)彎、以及S型彎道等循跡運(yùn)動(dòng)。
足式運(yùn)動(dòng)“行走”時(shí),“北理哪吒”的最大速度為每小時(shí)4公里,最大步幅0.3米,最大抬腿高度0.2米。由于結(jié)構(gòu)中心對(duì)稱,機(jī)器人能夠“縱橫”漫步,自由向任何方向直接移動(dòng),如果地形復(fù)雜,機(jī)器人憑借腳上的觸覺(jué)傳感器,還可以在不平地面上的漫步行走。
“平坦路面時(shí),采用輪式運(yùn)動(dòng),速度快、能源效率高,而復(fù)雜路面時(shí),采用足式運(yùn)動(dòng),環(huán)境適應(yīng)性強(qiáng)、越障能力好。輪足復(fù)合運(yùn)動(dòng)時(shí),機(jī)器人可以實(shí)現(xiàn)主動(dòng)隔震并實(shí)時(shí)調(diào)整,保證水平穩(wěn)定。”“北理哪吒”能自主切換運(yùn)動(dòng)模式,適應(yīng)不同的環(huán)境,這樣的“腿功”離不開(kāi)團(tuán)隊(duì)在復(fù)雜運(yùn)動(dòng)控制理論方面的深厚積累。
一碗水能端“平”的“大力士”
“北理哪吒”并不是一臺(tái)“為走而走”的機(jī)器,這在同學(xué)們策劃項(xiàng)目之初,就在老師的指導(dǎo)下,有所考慮。創(chuàng)新方案設(shè)計(jì),也賦予了其在承載力和隔震效果方面驚人的潛力。
這臺(tái) “北理哪吒”機(jī)器人,總功率為15千瓦,最大承載力達(dá)到300公斤,四個(gè)成年人直接乘坐,運(yùn)動(dòng)自如,如此負(fù)重續(xù)航可分別達(dá)到足式運(yùn)動(dòng)1小時(shí)、輪式運(yùn)動(dòng)2小時(shí)和輪足復(fù)合式運(yùn)動(dòng)45分鐘。從負(fù)載重量與功率比來(lái)看,表現(xiàn)出色,潛力巨大。
除了出色的負(fù)重能力之外,要想成為有效的工作平臺(tái),還必須要確保平穩(wěn),否則其應(yīng)用也將大打折扣,但在目前機(jī)器人研究中,要實(shí)現(xiàn)兼顧通過(guò)性、負(fù)重能力和隔振性能,可謂挑戰(zhàn)巨大。
“北理哪吒”由于其使用倒置并聯(lián)多自由度平臺(tái)和輪足相結(jié)合作為支撐,特別是性能出色的一體化電動(dòng)缸作為基本驅(qū)動(dòng)裝置,充分發(fā)揮了其控制準(zhǔn)確、精度高的特點(diǎn),使得動(dòng)作過(guò)程平穩(wěn)到位。而在最能考驗(yàn)隔振效果的輪足復(fù)合運(yùn)動(dòng)過(guò)程中,對(duì)振動(dòng)可實(shí)現(xiàn)快速響應(yīng),“瞬間”化解沖擊,確保平臺(tái)的整體平穩(wěn)。因此,“北理哪吒”是一位能將一碗水端“平”的“大力士”,名副其實(shí)。
除了以上的“神力”之外,團(tuán)隊(duì)還為“北理哪吒”安裝了GPS、激光雷達(dá)和雙目視覺(jué)功能的組合導(dǎo)航系統(tǒng)。由于運(yùn)動(dòng)方式靈活、能源效率高、地形適應(yīng)性強(qiáng)和負(fù)載能力大等優(yōu)勢(shì),“北理哪吒”應(yīng)用前景廣泛。例如在軍用領(lǐng)域,既可以作為移動(dòng)式無(wú)人武器平臺(tái),加裝偵查、火力裝備等,也可以作為戰(zhàn)地后勤保障機(jī)器人或步兵班組支援系統(tǒng),實(shí)現(xiàn)在平整道路上的快速突進(jìn)和復(fù)雜地形下的穩(wěn)定行進(jìn),大負(fù)載能力,可滿足包括步兵班組裝備攜帶等戰(zhàn)地后勤需求。而在民用領(lǐng)域,可以在復(fù)雜地形下,實(shí)施搶險(xiǎn)救災(zāi)和資源勘探,還可以為殘障人士提供服務(wù)保障等。

運(yùn)動(dòng)驅(qū)動(dòng)與控制研究團(tuán)隊(duì)
“北理哪吒”并不似神仙騰云駕霧,也沒(méi)有花哨的三頭六臂,原始創(chuàng)新的背后,并無(wú)太多傳奇。北理工學(xué)子們腳踏實(shí)地創(chuàng)新研究的基礎(chǔ),來(lái)自于多年服務(wù)軍工國(guó)防中積淀的學(xué)科優(yōu)勢(shì),科學(xué)嚴(yán)謹(jǐn)、鼓勵(lì)創(chuàng)新的學(xué)術(shù)氛圍,和指導(dǎo)教師的循循善誘。而參與創(chuàng)新項(xiàng)目的同學(xué)們,更深深懂得不僅要埋頭于實(shí)踐中扎實(shí)鉆研,把研究踏實(shí)做透,也要抬起頭關(guān)注前沿,瞄準(zhǔn)一流。





